已解答
中等
相关标签
 相关企业
相关企业
给定一个链表的头节点 head ,返回链表开始入环的第一个节点。 如果链表无环,则返回 null。
如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。 为了表示给定链表中的环,评测系统内部使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。如果 pos 是 -1,则在该链表中没有环。注意:pos 不作为参数进行传递,仅仅是为了标识链表的实际情况。
不允许修改 链表。
示例 1:
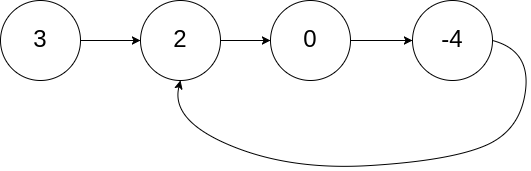
输入:head = [3,2,0,-4], pos = 1
输出:返回索引为 1 的链表节点
解释:链表中有一个环,其尾部连接到第二个节点。
示例 2:
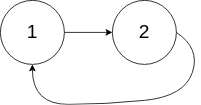
输入:head = [1,2], pos = 0
输出:返回索引为 0 的链表节点
解释:链表中有一个环,其尾部连接到第一个节点。
示例 3:

输入:head = [1], pos = -1
输出:返回 null
解释:链表中没有环。
提示:
链表中节点的数目范围在范围
[0, 104]内-105 <= Node.val <= 105pos的值为-1或者链表中的一个有效索引
进阶:你是否可以使用 O(1) 空间解决此题?
为什么两个指针从相遇点和起始点出发,最终会在环的开头相遇?
关键推导回顾
设:
X= 链表头节点到环入口的距离Y= 环入口到快慢指针相遇点的距离Z= 相遇点沿指针方向回到环入口的距离环的长度
L = Y + Z
当快慢指针相遇时:
慢指针步数:
S = X + Y快指针步数:
2S = X + Y + n × L(n是快指针绕环的圈数,n ≥ 1)
联立方程:
math
2(X + Y) = X + Y + nLmath
X + Y = nLmath
X = nL - Y将 L = Y + Z 代入:
math
X = n(Y + Z) - Y = (n-1)L + Z物理意义
X(头到入口) =Z(相遇点到入口) +(n-1)L(整数倍环长)这意味着:
从链表头走到环入口的距离X,等于从相遇点走到环入口的距离Z加上(n-1)圈环的长度。
双指针移动过程分析
指针设置:
指针A:从链表头出发
指针B:从相遇点出发
移动规则:
两指针每次都只走 1 步,速度相同。相遇时刻:
当指针A走了
X步到达环入口时:指针B走了
X步将
X = (n-1)L + Z代入:指针B的总移动距离 =
(n-1)L + Z这相当于:先走
Z步到达环入口,再绕环走(n-1)圈(每圈L步)
最终位置:
指针A:停在环入口
指针B:走完
Z步到达环入口后,又绕了(n-1)圈,最终也停在环入口
→ 两指针在环入口相遇!
示例演示(n=1 最简单情况)
链表结构:1 → 2 → 3 → 4 → 5 → 3(环入口是节点3,相遇点设为节点5)
计算:
X= 头到入口 = 2步(1→2→3)Y= 入口到相遇点 = 2步(3→4→5)Z= 相遇点到入口 = 2步(5→6→3,环长 L=4)n = 1(快指针绕1圈)
双指针移动:
结果:在第2步时,两指针在环入口3处相遇。
示例演示(n=2 复杂情况)
链表结构:1 → 2 → 3 → 4 → 5 → 6 → 3(环入口3,环长 L=4,相遇点设为节点6)
计算:
X= 头到入口 = 2步(1→2→3)Y= 入口到相遇点 = 3步(3→4→5→6)Z= 相遇点到入口 = 1步(6→3)n = 2(快指针绕2圈)X = (2-1)×4 + 1 = 5
双指针移动:
结果:在第5步时,两指针在环入口3处相遇。
指针B:先走
Z=1步到入口,再绕1圈(4步)后回到入口指针A:走
X=5步到达入口
核心结论
必然在环入口相遇:
无论n是多少,当指针A走完X步到达入口时,指针B一定恰好走完Z + (n-1)L步,相当于从相遇点走到入口后再绕(n-1)圈,最终也停在入口。数学保证:
公式X = (n-1)L + Z决定了两个指针的路径终点必然重合于环入口。时间复杂度:
最多遍历链表长度 2 遍(找相遇点 + 双指针移动),仍是 O(n)。
这就是 Floyd 环检测算法的精妙之处! 🚀
最坏情况:
当慢指针刚进入环时,快指针正好在慢指针的前一个位置(即距离慢指针 L−1L−1 步)。
此时,快指针需要追赶 L−1L−1 步才能与慢指针相遇。
慢指针的移动:
在这 L−1L−1 步中,慢指针自己也会走 L−1L−1 步。
但由于环的长度是 LL,所以慢指针最多走 L−1L−1 步,不会走完一整圈(即不会回到环的起始点)。
数学关系:
快指针走的步数 = 2×(L−1)2×(L−1)。
慢指针走的步数 = L−1L−1。
由于快指针速度是慢指针的 2 倍,两者最终会在慢指针走 L−1L−1 步时相遇。
举例验证(环长 L=4L=4)
初始状态:
慢指针刚进入环(位置 0)。
快指针在位置 3(距离慢指针 L−1=3L−1=3 步)。
移动过程:
结果:
慢指针走了 3 步(L−1=3L−1=3),未走完一圈(4 步)。
快指针走了 6 步(2×32×3),绕环 1 圈半。
为什么这是最坏情况?
如果快指针离慢指针更近(比如距离 2 步),相遇会更快(只需 2 步)。
只有距离 L−1L−1 时,需要最多的 L−1L−1 步才能相遇,因此这是最坏情况。
对算法的影响
由于慢指针最多走 L−1L−1 步,因此:
公式 S=X+YS=X+Y 中,Y<LY<L(慢指针在环内走的步数 YY 不会超过 L−1L−1)。
这保证了快慢指针方法的时间复杂度是 O(n)O(n),且能正确找到环入口。
总结
你的理解完全正确:在最坏情况下(快指针距离慢指针 L−1L−1 步),慢指针需要走 L−1L−1 步才会被快指针追上,且不会走完一整圈。
这解释了为什么 S=X+YS=X+Y 无需考虑慢指针多走圈数,因为 Y<LY<L。
class Solution {
public:
ListNode* detectCycle(ListNode* head) {
//对是否存在环进行判断
ListNode* fast = head;
ListNode* slow = head;
//获取关键节点
ListNode* strat = head;
ListNode* meetNode = nullptr;
while (fast != nullptr && fast->next != nullptr) {
fast = fast->next->next;
slow = slow->next;
if (fast == slow) {
meetNode = fast;
break;
}
}
if (meetNode == nullptr) {
return nullptr;
}
//如果存在环 则从起点和meetNode同时开始走
while (strat != meetNode) {
strat = strat->next;
meetNode = meetNode->next;
}
//此时相遇的节点就是环的起点
return strat;
}
};